

How A Quadcopter Works Along With Propellers And Motors

Understanding how quadcopters really work can be found in the design of propellers and motors. You don’t need any special skills to operate the quadcopter today. If you compare a quadcopter to an airplane or helicopter, you will notice that the design and engineering are quite different.
A quadcopter is an aircraft with four rotors. The propellers are powered by electric motors and the direction of the motor determines which way the propeller will spin. You have two motors that are spinning in one direction (clockwise), and you have two motors that are spinning in another direction (counterclockwise).
For this reason, most quadcopters use two sets of identical motors spinning in opposite directions so that there’s always some thrust that is being generated even if one set fails or isn’t working properly for any reason.
In this article, we will look more into detail at how a quadcopter flies, what propeller design is necessary, the configuration of a drone, and what calculations are needed! There are also linked videos in this article that are showing YouTube videos where you can learn even more about how this process work by seeing it.
For those who want to know more, I wrote also another interesting article that you can read; How do Drones Work and What is Drone Technology.
How A Quadcopter Works?
To understand how a quadcopter flies, we need to know what components are required for a quadcopter to operate, what forces affect it, and how it is connected with a remote controller.
We must remember that drones can fly autonomously through programmed waypoint navigation software and fly in any direction from point to point. So let’s take a closer look and see what technology does a quadcopter use.
The direction of rotation of the propellers along with the speed of the motors makes it possible to fly and maneuver the quadcopter. The remote control of the quadcopter sends information to the controller on the drone and transmits data to the motors through their electronic speed control circuits (ESC) about thrust, RPM (Revolutions Per Minute), and direction.
The flight controller uses that data and combines it with the IMU (Inertial Measurement Unit), gyroscope, and GPS before signaling thrust and rotor speed to the quadcopter motors.
When it comes to the manufacture of quadcopters, the motor design, and propellers, are the main 4 forces that affect the entire flight, and they are taken into account: weight, lift, thrust. Math is very important and it is used to calculate the thrust of the quadcopter motor, while the aerodynamics of an aircraft is used to calculate the propeller and air movement above, below, and around the quadcopter.
Basic Principles Of How A Quadcopter Works
With just a little experience, you can easily operate almost any quadcopter. All you need to do is to use the Remote Controller and move the sticks on it, which will then send the quadcopter in a certain direction.
If we do not go into the physics of processes and complex scientific terms, then we can easily explain the work of the quadcopter. For this, it is initially worth noting that the rise of such a device to a certain height is possible due to the rotation of the blades and the presence of various electronics.
With the knowledge of understanding how a quadcopter works, you will be able to detect any problem or issue when it comes to a propeller or a motor on the drone.
For those who want to know more, here you have Physics Behind How Drones Fly.
For that reason, it is important for you to understand the quadcopter motor thrust and propeller design. If something happens to your drone, you can easily change or remove some part on the drone such as a camera, lidar sensor, or any other removable object.
Keep in mind that different payloads will significantly impact the flight of the quadcopter and its balance. This is important for those who are building their own quadcopters from scratch, as they must consider and understand the motor and propeller design.
In that case, the right motor configuration is needed, along with the right propellers, IMU, GPS, and electronic speed control circuits that match the right frame of the drone. For those who want to know what are the basic parts of the quadcopter, you can read this great article: Drone Parts And Components Overview.
Quadcopter Motor & Propeller Direction Explained

Understanding How A Quadcopter Flies
Basically, the quadcopter is controlled by using the sticks on your remote controller, which then sends the signal to the central flight controller on the drone.
The pilot, after activating the device using the control panel (the transmitter), gives a certain signal to execute the command. A receiver mounted on the mainboard receives this signal and decodes it for transmission to the control board or directly to the motors of the quadcopter.
Step-by-Step process of working principle of a quadcopter:
- Remote Stick Movement
- Central Flight Controller
- Electronic Speed Control Circuits (ESC)
- Motors and Propellers
- Quadcopter Movement
The more complex and expensive the quadcopter, the better and more innovative the technology of its control, but the principle always remains the same.
Central Flight Controller
The Central Flight Controller receives information from the IMU, GPS modules, gyroscope, and obstacle detection sensors if they are installed on the quadcopter.
It then performs calculations by using programmed flight parameters and complex algorithms, where that data is then sent to electronic speed controllers (ESCs).
Almost all flight controllers of modern quadcopters include an IMU, Gyroscope, GPS, and much more functions to control the flight and stability of the quadcopter. Some models even come with a dual IMU system for safety reasons, such as RTH (Return to Home). A great example would be the flight controller of the DJI N3 Flight Controller, which comes with a lot of features.
Electronic Speed Control Circuits (ESCs)
An Electronic Speed Control (ESC) is an electronic circuit that is installed on each motor on the quadcopter to change the speed, direction, and braking of an electric motor.
Therefore, ESC can be considered as the essential component of every modern drone. They provide high frequency, high power, and a 3-phase AC for motors. As technology has advanced, ESC is now a very small component that goes to the drone’s mainboard. For a quadcopter to fly, it relies entirely on the speed that is coming from the motors that are driving the propellers.
If you want to learn more about how electronic speed controllers work, check out this great video.
Drone Propulsion System
For every quadcopter to work smoothly, it needs to have all components in place. If any of the components are missing, the drones will be in trouble. Here is the list of the main motor components of a quadcopter and propulsion system;
- Motor (rotor)
- Motor Stator
- Cooling System
- Windings
- Wiring
- Arm
- ESC
- Propellers
- Bearings
Quadcopter Motor Propeller Direction
Quadcopter Vertical Lift – How It Works?
Vertical lift depends on the direction of rotation of the drone propellers. In order for the quadcopter to rise into the air, it is necessary to create a lift that is equal to or greater than the gravity. This is the basic principle of how quadcopters take off. The quadcopter uses specially design propellers and motors to create the required thrust to control the force of gravity on the aircraft.
When the propellers rotate in the given direction, the blades are pushing the air down. This is possible by Newton’s Third Law, which says that for every force (action), there is an equal (force) and opposite reaction force. Therefore, as rotors (propellers) on the quadcopter push down the air, the air is producing an opposite reaction force and is pushing up on the rotor. The more power the rotors produce, the greater the lift of the drone will be.
By using this method, the quadcopter can hover, climb or descend. Therefore, we will describe each of these actions in more detail. Here is the explanation:
- Quadcopter Hover – For a quadcopter to hover, there must be the net thrust that is produced by the four rotors that are equal to the gravity, which is pulling the drone down. If the force is greater or less, the drones will then rise or descend.
- Quadcopter Climb – If the thrust of the four rotors on the quadcopter is greater than the weight of the drone and the gravity, then the quadcopter will go upward. If not, drones will not be able to climb up.
- Quadcopter Descend – For the quadcopter to go down, the thrust of the four rotors must be less than the gravity and weight of the drone. This means that the propellers will rotate with less power, where gravity will prevail and lowers the drone down.
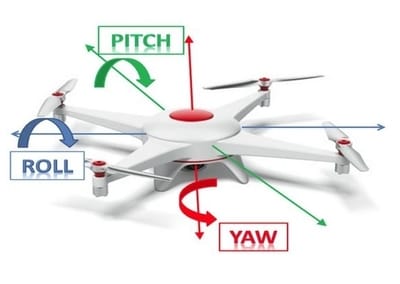
Quadcopter Propeller Direction – Yaw, Pitch, Roll
One of the first things we need to understand before we get into more detail about how a quadcopter works is to understand the terminology of a drone. The drone can move forwards, backward, sideways, or rotate around its axis. These terms are known as Pitch, Roll, and Yaw.
- Pitch (Transverse Axis) – If the quadcopter wants to move forward or backward, it is called pitch. Forward pitch can be achieved by pushing the remote control stick forward. Same thing, but in opposite direction is if you want to move your quadcopter backward.
- Yaw (Vertical Axis) – When the quadcopter is rotating around his axis, that is called yaw. This means that the drone can go either right or left. This is considered the basic movement that a quadcopter can perform.
- Roll (Longitudinal Axis) – If you want to fly sideways (left or right) with your quadcopter then you use roll. This is done by pushing the right throttle stick, which makes the drone fly right.
There are some more advanced models on the market such as Yuneec Q500 4k, that can fly in 2 different ways. It can be done by controlling the drone as you are the pilot or from the perspective that you are actually in the quadcopter.
In the following video you will see exactly what pitch, roll and yaw movements are and how they work.
Quadcopter Motor Direction For Yaw
As we have already explained, yaw is used to rotate a quadcopter either left or right. On a quadcopter such as the DJI Mavic 2 Pro, Yaw is controlled by the right stick on the remote controller. By moving the joystick on RC left or right, you will rotate the aircraft left or right.
The process is the following: the remote control ground stations send the signal to the flight controller that receives the data to the drone’s ESC circuits that control the speed and configuration of the motors. The process of how this works can be seen in the configuration diagram below.
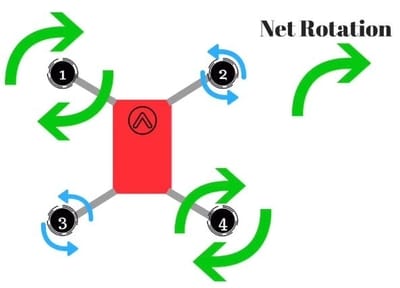
This is the diagram of the famous DJI Phantom 3 quadcopter, where you can see the direction of rotation of each individual propeller.
What we can see in the figure is that two motors on the quadcopter rotate counterclockwise (CCW) while the other two motors rotate clockwise (CW). The reason why they rotate that way is to get the total angular momentum of zero.
But what is angular momentum? Angular Momentum is the rotational equivalent of linear momentum. As the angular momentum depends on the choice of the origin (as well as on the study frame of reference (R)) it is always necessary to specify this origin and never to combine angular moments having different origins.
If we have no torque on the motors on our quadcopter, then the angular momentum will be constant, in other words, zero. So, to better understand the angular momentum of the examples we described above, we can use the two propellers that are rotating counterclockwise (CCW) and say that they have positive angular momentum, while the other two propellers that are rotating clockwise (CW) have negative angular momentum. Therefore, if we assign the value to each motor of -4, +4, -4, +4, the total result will be zero.

If we want our quadcopter to rotate right, then we must decrease the angular velocity of one motor to have an angular momentum of -2 instead of -4. Here we will have the total angular momentum of the quadcopter that would be +2. This isn’t right. In this case the drone will rotate clockwise (CW), where the body of the quadcopter will have an angular momentum of -2.
By decreasing the spin of one rotor on the quadcopter will cause the aircraft to rotate. The net upward force will not equal the gravitational force where the quadcopter will descend.
Therefore, we must keep in mind that quadcopter motor thrust is not the same and for that reason the quadcopter becomes unbalanced. In this case, the quadcopter will tip downward to the direction of motor 1. The quadcopter body (frame) will rotate because the angular momentum of the rotors still isn’t up to zero. The combined force will remain equal to the gravitational force, so the quadcopter will continue to hover.
Quadcopter Propeller Direction For Pitch And Roll
Some models of quadcopters are very symmetrical (DJI Phantom 4 Pro, Holy Stone HS 100, etc.) when it comes to their design, and that’s why there is no big difference between when they move forward or backward. So, in some cases, we can say that there is no difference when you want to fly backward or sideways.
When the drone flies forward, the quadcopter motor rotation rate is increased (RPM) on rotors 3 and 4, while the rotation of motor 1 and 2 (front motors) is decreased. That way, the total thrust force on the quadcopter will remain equal to the weight and the quadcopter will stay at a same vertical level in the air.
It is worth noting that one of the rear rotors on the quadcopters is spinning counterclockwise (CCW), while the other rotor is spinning clockwise (CW). This will increase the rotation of those motors and will produce zero angular momentum. The same rule applies to the front rotors so that the drone does not rotate.
Working Principle of Quadcopter – Video
In the following video you will see the basic principle of how a quadcopters work. The video shows the basic of how a drone flies.
How Quadcopter Motors Work
If you want to understand the full principle of how a quadcopter works, then you must know how motors on a drone work. Below we will explain the basic things about quadcopter motors and what you need to pay attention to. Today, there are various types of motors, both by their design, technology, and brands.
Brushless Quadcopter Motors
Almost all drones on the market today use brushless electric motors. These types of motors are way more efficient and quieter than the old brushed motors. When we talk about motor efficiency, they consume less battery, providing more flight time. It is therefore important to emphasize that the type of motor and design are important too.
For a quadcopter to fly safely, without any big vibrations, it is important to choose the very best motors (brushless motors) for your quadcopter. While most major manufacturers like DJI already use the best motors that are available on the market, if you decide to make your own DIY drone, you need to pay attention to it.
Clockwise (CW) & Counter Clockwise (CCW) Motor Direction
Each quadcopter comes with 4 motors to which 4 propellers are attached. For a quadcopter to fly stably the propeller rotation must be directed towards the main body (frame). 2 motors rotate in one direction while 2 motors rotate in the other direction. Therefore, the motors on the drone must be set up correctly.
- Front Right Propeller – Counter Clockwise Motor (CCW)
- Front Left Propeller – Clockwise Motor (CW)
- Back Right Propeller – Clockwise Motor (CW)
- Back Left Propeller – Counter Clockwise Motor (CCW)
Keep in mind that the propellers on the motors are set up correctly. This means that the CCW propeller must be placed on a CCW motor.
Quadcopter Motor Popular Brands
1. DJI – Motors, ESC & Propellers
We can say with certainty that DJI is the largest and most quality manufacturer of drones in the world. They are like the apple in the phone industry and own more than 70% of quadcopters on the market.
But DJI is not only involved in drones, instead, they also manufacture the equipment that comes with drones such as gimbals, propellers, motors, etc. If you want to choose the highest quality propellers or motors, DJI is the first place where you will buy them.
One of the latest quadcopter motors that come from DJI is E2000, E5000, E305, and Snail. All of these motors and propulsion systems contain the drone motor, propellers, ESCs, and cooling systems. DJI claims that their motors are waterproof and can be exposed to rain.
Quadcopters today are used in a lot of areas where they help people to do their jobs, but in the near future, they will do a lot more. If you are interested, you can read 10 Ways Drones Will Be Used in The Future. Some of the industries that quadcopters are used today are agriculture, film industry, rescue missions, sports, etc. In some of these industries, drones must have sealed motors to work and do their job.
2. T- Motor Company – Motors, ESC & Propellers
T-Motor that is also known as Tiger Motor was founded in 2009, and it is specialized in R&D, production, sale, ESCs, propellers and it is manufacturing high-quality systems for UAVs. This company is producing the best quadcopter motors on the market, mostly used for aerial photography, filming, agriculture, and many more things.
2.1.1. Motors From T-Motor
There are a total of 32 types of motors that are produced by the T-motor company;
- 8 Navigation Type
- 4 P Type Motors
- 4 FPV Type
- 4 U Efficiency Type
- 4 U Power
- 4 Anti-gravity
- 4 Gimbal Type
2.1.2. Motors From T-Motor
Every T-Motor comes with a 17 type of ESC circuits;
- 4 Flame Series
- 4 Alpha Series
- 4 FPV Series
- 3 Air Series
- 2 T Series
It is noticeable that these ESC circuits come with a really high spec. Here we can take a closer look at the features of the T-Motor Alpha 40A ESC.
The T-motor Alpha 40A LV comes with low noise and temperature levels. FOC (Field Oriented Control) Technology works by controlling the motor output via the help of current flow that controls the magnetic field and torque of the motor.
Some of the intelligent features that come with T-Motor Alpha Series for the motor are;
- Protection from short circuit
- Protection from Throttle loss
- Protection from Motor Lock
- Protection from Low voltage
- Efficient Cooling System
- Nano coating
Quadcopter Motor Thrust Calculators
If you want to know how to calculate the quadcopter motor thrust in a very precise and safe way, check out this LINK. In addition to this site, there are many others where you can calculate thrust online. Here you have my top 3 picks that you can use to calculate the thrust and lift of a quadcopter:
- eCalc Multicopter Thrust Calculator
- DriveCalc Quadcopter Lift Calculator
- GoBrushless Thrust Calculator
Quadcopter Propeller Design
Number of Blades
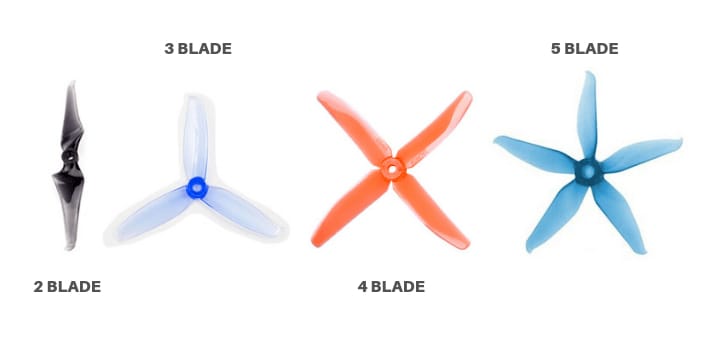
Traditionally, quadcopters are equipped with two-bladed propellers. But some models have three, four, or even five blades on their propellers. By creating a more even airflow, the multi-blade propeller reduces turbulence and increases lift. This quality allows drones with a small propeller diameter to exhibit lift and flight stability unlike the larger models with the classic two-bladed propeller.
Drones with multi-blade propellers are characterized by responsiveness and high maneuverability, which is important when performing aerobatics stunts. The main disadvantage of multi-blade screws is the difficulty of balancing, which affects the manufacturing difficulties and, consequently, the final cost of the part.
Propeller Size Explained
Every quadcopter is different, therefore there are a vast majority of types of propellers by dimensions, and the materials from which they are made. The more expensive the propeller, the better the quality, which means it will produce less vibration.
If you are a professional photographer, and you want to take high-quality photos, then you need to invest money and buy quality propellers to avoid vibrations. For those who understand drones a little better, what you can use is a propeller balancer to check the status of your props every few flights.
When it comes to choosing the right propellers for your drone, you must keep in mind that there are 3 simple measurements to add extra quality to your quadcopter.
- Propeller Pitch – Propellers dimensions sometimes can be quoted in the form 21 x 7.0 inch (533 x 178 mm). The first number represents the length of the propeller, while the second number is defined as the distance a propeller would move forward in a single full revolution. If the propeller has 7.0-inch pitch, he would move forward 7.0 inches in one revolution.
- Bore – This is the measurement, representing the size of the hole in the center of a propeller. It must match to the shaft of the chosen motors. Adapters in most cases are available to downsize a propeller’s bore. Some propeller models (such as T-Motor), in some cases use a direct mounting system.
- Length – The first and most important part of quadcopter propellers is the length, which is in most cases measured in inches. The size of your propellers is chosen in a way that it is compared to the Kv rating you have. The smaller the propellers on your drone are, the higher the Kv rating of your motors needs to be.
When the drone has smaller propellers, that allows you the greater speed, while the negative side is that it reduces efficiency. With larger propellers, the quadcopter can fly steadily.
Self Locking – Most modern quadcopters are using self-locking propellers. The term ‘Self Locking’ means that the 2 motors are spinning clockwise (CW), while the other 2 motors are spinning counterclockwise (CCW) on a quadcopter. Therefore, when using propeller threads that are opposite to the motor direction, the propellers will automatically lock themselves down.

Quadcopter Propellers – Large or Small?
If you want to have a greater pitch on the quadcopter, then you will need higher thrust and the right motor output. Most quadcopters use propellers with pitches that are in the range of 3 to 5 inches.
It is worth mentioning that lower pitches are most often more efficient. Therefore, the larger the propellers are on the quadcopter, the more energy it will need to spin it.
However, if you have larger propellers on your quadcopter, you will increase the aircraft speed. That is why propellers that have smaller diameters or pitches can certainly spin faster. That is because the motor uses less energy to spin and therefore it uses less current. Keep in mind that the faster change of RPM helps the stability of the drone.
Clockwise (CW) & Counter-clockwise (CCW) Propellers
Every quadcopter comes with 4 propellers, and on each propeller, you have a mark where it says CW or CCW. CW stands for clockwise while the CCW stands for counter-clockwise. Two propellers on the quadcopter spin CW, while the other two spin CCW. That is why it is important to match CW and CCW propellers to generate thrust on your aircraft.
Here we have put a great picture where it is shown how CW and CCW propellers look. Every propeller model is marked with a serial number. Therefore, you need to take a closer look at your propellers to find out which one is CCW and which is CW.

Quadcopter Propeller Material
The most used and popular quadcopter propeller material is generally plastic. They are flexible and resistant to damage; manufacturers do not get tired of pleasing with an assortment of such parts. The main drawback of plastic propellers is precision balancing problems. The vibrations caused by the imbalance disrupt the operation of the gyroscopes, which negatively affects the quality of the captured material (if the drone is carrying a camera).
The second type of material used in the manufacture of quadcopter propellers is carbon fiber (carbon). Carbon propellers are strong and tough enough (easy to balance), while they are lightweight, that is, they are quite effective for use in the case of large radio-controlled models for professional aerial photography. Only one thing stops their massive use – the high price!
Carbon fiber reinforced plastic (ABS plastic) is a cross between the first and second options. This type of propeller is notable for its sufficient strength and rigidity, and the price of such parts can be called democratic.
Related Article: Are Drone Propellers Dangerous? Ways To Avoid Injuries
How To Choose The Best Quadcopter Propeller
In this video, you will see how you can choose the best propellers for your drone. Keep in mind that choosing the right props can be very important sometimes.
Conclusion
I hope that after reading this article you are much better understanding on how quadcopters work and what components they consist of. When we go into depth, we see that it’s not really that complicated and that almost anyone can understand the basic way a quadcopter works. I hope you have learned something new and if you have any questions feel free to write.
