

Physics Behind How Drones Fly

You have a drone, but you don’t know how it actually flies? I will try to bring you the simple physics and explain in detail how they can actually fly. We will go over all things drone-related, like the: remote control and the GPS system that is connected to the drone. We’ll also look at the most common problems while flying and how to work around them. Let’s get started.
What is a Drone?

I’m pretty sure you heard so far the word „Drone“. The term drone originated from the military, referring to any unmanned aerial vehicle (UAV) with a pre-programmed path, basically with no human control. The quadcopter (drone with 4 propellers) is the most popular consumer drone. Quadcopter is a multi rotor helicopter that are lifted and propelled by four rotors.
These propellers are connected to motors which electronic speed controllers drive. If you are one of those people who would like to learn everything about drones, I recommend The Complete Guide to Drones, which you can find on Amazon.
Quadcopter use independent variation of the speed for each rotor to achive control. This drone also consists of a microcontroller. It’s just a small computer, and it is connected to different sensors that include accelerometer and gyroscope which provides orientation information. A reciver is connected to microcontroller which transfer instruction from remote control to microcontroller. A battery powers all these things.
> Get the Latest DJI Mavic 3 Pro <
How Do Drones Fly?
A lot of people ask me the science and physics of how drones actually fly. I don’t know if they’re just making small talk or whether they’re genuinely curious, but lets learn! So let’s just look at the simple physics of how drones fly.
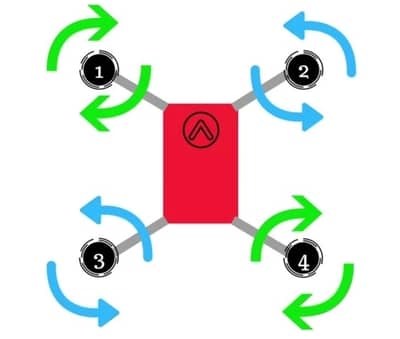
Rotor Direction. The drone is a quadcopter which has 4 rotors that are all connected to individual motors, allowing them to move at different speeds. The two diagonal rotors will rotate clockwise, while the other two diagonal motors will rotate anti-clockwise. The two opposite rotations balance out and keep the drone steady.
So if all the rotors were to spin in the same direction, it would result in a net Torque causing the complete quadcopter to rotate. When the rotors spin together, they push down on the air and the air pushes back up on the rotors. When the rotors spin fast the drone lifts up into the sky, and when the rotors slow down the drone will descend towards the ground.
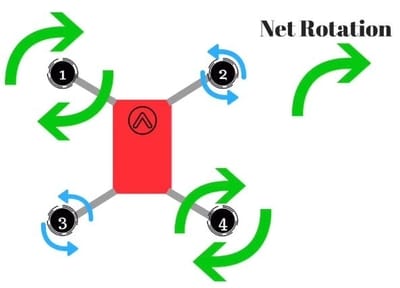
Drone Rotation. When you want the drone to turn, you slow down two of the diagonal motors and you speed up the other two diagonal motors. Remember how the motors next to each other are spinning in opposite directions, so by slowing down two going in one direction and speeding up two going in the other direction.
The drone will accelerate as fast as possible from the ground, depending on how fast the propellers rotate. The lift will remain constant so the drone doesn’t change height, but the angular momentum in increased so the drone will turn in place.
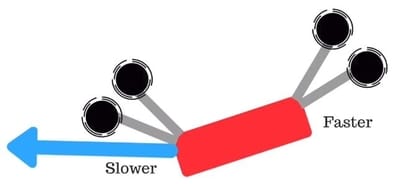
Forward / Backward. If you want the drone to move forwards or backwards, you slow down two rotors on one side of the drone and speed up the two rotors on the other side. The drone tips slightly toward the slower side and move in that direction.
This is according to Newton’s 3th law of motion that every action has an equal but opposite reaction. If you want to move sideways or backwards, we just use the same principle on the other sides of the drone.
Remote Control. The way we control the rotor speeds of the drone is by using the joysticks on the remote, which work to increase or decrease the voltage being delivered from the battery to each of the four rotors. If a motor is getting more voltage, it’s gonna go faster.
Also, lithium Ion batteries power drones and it’s really important to maintain healthy batteries to get maximum flight time. Also, a lot of drones have a built-in GPS so they know exactly where they are. If for some reason your remote control disconnects from the drone, it knows to fly straight back to where it came from.
Drone (Propeller) Thrust
One of the very common terms when we talk about drones is Thrust. So what does the propeller thrust mean in terms of speed and how physics affects it? Drone Thrust can be defined when your drone uses full throttle, and producing as much upward force as possible. With that you can determine how much the drone can lift by the thrust a drone generates.
Drone thrust must be greater than the weight of the drone, for that drone to take off and actually fly. When a drone propeller is in a moving situation, the thrust changes. When the drone throttle is at 100% the prop will be at maximum thrust.
> Get the Latest DJI Phantom 4 Pro <
To know how much thrust your drone will produce for a given propeller, you have to test the motor thrust or read the instructions that manufacturers provide for your drone.
But in reality, what to expect is to see 5 to 10% less thrust in real flight as compared to the bench tests. The more thrust drone provides, the better acceleration is, what provides greater impulse for the drone.
Attitude of The Drone
When we talk about attitude, it provides information about an object’s orientation with respect to the local level frame (horizontal plane) and true north. So when we talk about attitudes we have 3 components: Roll, Pitch and Yaw.
The easiest way to understand what we mean by attitude is to consider a drone with three linear axis running through it. Below in the text we will use these 3 terms to define the movement of our drone.
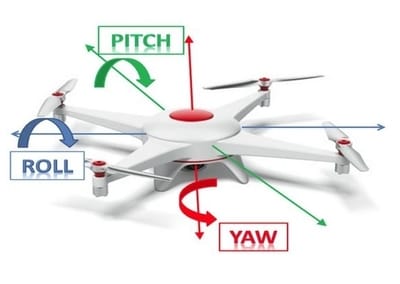
Roll: We Move to the Left or Right Compared to the Front.
Pitch: Moving Forward or Backwards.
Yaw: Rotation about the center.
Roll
So lets explain what is Roll. You are flying your drone and you want to rotate it for 180 degrees. How do you do it, and whats the physics behind it? If you want to roll your drone towards the left, the thrust you need to create is increased on the motors on the right, and at the same time we decrease the thrust on the motors on the left.
So to rotate the drone without creating problems is to decrease the spin of rotor 1 and 3 and increase the spin for rotors 2 and 4 and the drone will stay balanced. If there is no torque on the drone, then the total angular momentum must be zero.
Pitch
First thing you need to know is: What is the difference between moving forward or backward? None, because the drone is symmetrical. Consider a drone as a car where every side is the front. By this, I mean it’s the same thing like explaining a car moving backward or forward. So if you want your drone to fly forward, you will need a forward component of thrust from the rotors. So how will we do this?
The first thing you need to do is to increase the rotation rate of rotors 3 and 4 (the rear ones) and decrease the rate of rotors 1 and 2 and therefore the thrust force will remain equal to the weight. Now that we know that one of the rear rotors is spinning counterclockwise and the other clockwise, the increased rotation of those rotors will still produce zero angular momentum.
Yaw
When we use the term Yaw in terminology of drones (aircrafts), it’s defined as the rotatition of the drone with respect to the center axis. Very simply said, if you were looking down on a drone from above, yaw refers to the movement of the drone clockwise or counterclockwise.
When we talk about YAW, it originates at the center of gravity of the drone and is directed toward the bottom of the aircraft. Motion about this axis is called yaw. This term is also applied in sailing, and it refers to the ship that is rotating about its vertical axis. The term yaw is also known as azimuth.
Forces and Moments That Affect Drone
Four propellers produce thrust Fi in the direction perpendicular to the plane of rotation of propeller. This thrust is proportional to square of angular velocity of propellers. As propellers rotate, they create reaction moment Mi on quadcopter about Z axis. This reaction moment is proportional to square of angle. Angular velocity of propeller.
Thrust produced by opposite pairs of propeller producing moment Mx and My. This moment is given by different of forces x length between two propellers. And last, the gravity force which is always acting in the downward direction. The motion of quadcopter can be analyzed by Newton’s second law of motion.

Taking Off and Hover Condition of Drone
So, how does the quadcopter hover in the air? To Rise above the ground, the drone needs a net upward Force. As a quadcopter is steady in air, it must be in equilibrium. The Motors of the drone generate thrust that is greater than the weight of quadcopter, making the quad rise upwards.
All the forces must be balanced, and the total thrust F1 + F2 + F3 + F4 produced by the propeller must be equal to the weight of the quadcopter and all the moment produced must be equal to 0. The governing equation of the motion in this condition is “All moments =0”. Motors generate thrust.
In case of rise motion the net thrust produced by all the propellers it more than the weight of the quadcopter. This result in output motion of quadcopter, which in such case is mr>0. For drop motion the thrust produced by all the propellers must be less than the weight of the quadcopter.

Drone Gyroscope
Different sensor devices are used here to determine an object’s position. The most common of these sensors are the gyroscope (usually shortened to Gyro). Simply put, the (electronic) gyroscope is a device that stabilizes the flight and holds the position. A gyroscope uses Earth’s gravity to help determine orientation.
Some of the external objects can cause them: like wind and inertia of the aircraft as opposed to the intentional remote control signal. By this we can very accurately stabilize the flight of multirotor devices. By this you can measures the rate of the UAV rotation and by this the craft will be in balance with respect to yaw, pitch and roll. In the 19th century gyroscope was inveted by famous physicist Jean-Bernard Foucault.
Be sure to check this drone if you are begineer: DJI Mavic 3 Classic.

Accelerometer
As the name implies, the accelerometer measures your drone’s acceleration forces, which help us maintain the drone’s orientation. This is an electromechanical device and the forces that the accelerometer measures are the force of gravity or dynamic to sense movement force. Looking mathematically, acceleration is the speed divided by time.
You can take this for example: if a car accelerates from a standstill to 60 mph in 6 seconds, the car has an acceleration of 10 mph per second (60 divided by 6). Accelerometers are made up of multiple axes, two to determine most two-dimensional movement with the option of a third is used for 3D positioning. If you want to buy your own accelerometer, you can do it HERE.
How Fast Can a Drone Go?
The short answer is “it depends”. Most of the drones you’d find on the internet (Amazon) at a price around $1000 have a speed under 60 mph. On the other hand, commercial drones have higher speeds, and in this category are also racing drones. Some of the professional drones (quads) can break the 100 mph speed mark.
One of the factors that you need to consider is air density, which a lot of them completely ignore when they fly a drone. The same goes when you fly your drone in differing temperatures and altitudes. Every drone has a rated service ceiling which means the rating based entirely on the drone’s ability to handle air density. Some of the fastest (racing) drones that are available on Amazon you can found by clicking HERE.
Drone Radio Control

First thing you need to know when you fly a drone, how it is controlled. There are situations where someone else’s is controlling your drone true remote control, with a use of a unique identification code to identify a transmission. The drone radio control system has 2 elements: the transmitter you hold in your hands and the receiver you put inside your drone.
In the simplest way it would work like this, your drone transmitter will read your inputs and send them through the air to your reciver in th real time. When receiver receive the information it passes it on the drones flight controller which makes the drone move accordingly to your comands.
Conclusion
Now that we’ve passed all the physics about drones, you’ve surely noticed that every movement is accomplished by changing the spin rate of one or more rotors on the drone. This can be done by remote controller which does this by increasing or decreasing the voltage to each motor.
But it’s not the point that you do that individually for each motor, because it would be crazy difficult to manually adjust. For that reason, drones have a control system, where you can simply push a joystick with your thumb and let a computer handle all of that.
To increase the ease and stability of the flight, drone has an accelerometer and gyroscope. So, in the end, behind all of that physics behind the drone we can see that it is pretty easy to fly a drone if you let the computer do all the work. I hope you learned physics behind the drone and if you have any questions, feel free to leave a comment below.